機器人機械手中的工業(yè)機器人與工業(yè)機械手
引言:在工業(yè)上,機器人機械手都發(fā)揮著重要的作用,為工業(yè)的發(fā)展發(fā)光發(fā)熱。可是機器人機械手中的工業(yè)機器人與工業(yè)機械手的區(qū)別,你知道嗎?不知道的話,沒關系,看完這篇文章,我們來告訴你。
工業(yè)機器人與輔助機械手兩者的區(qū)別主要體現(xiàn)在控制系統(tǒng)、操作編程和驅(qū)動系統(tǒng)上。在控制系統(tǒng)上,工業(yè)機器人一般都有獨立的控制器、驅(qū)動系統(tǒng)和操作界面,可進行手動、自動操作和編程,因此,它是一種可獨立運行的完整設備,可通過自身的控制系統(tǒng)來實現(xiàn)所需的功能。而機械手通常是用來實現(xiàn)換刀或工件裝卸的輔助裝置,其控制一般通過設備的控制器(如CNC,PLC等)實現(xiàn),它沒有自身的控制系統(tǒng)和操作界面,也不能獨立運行。
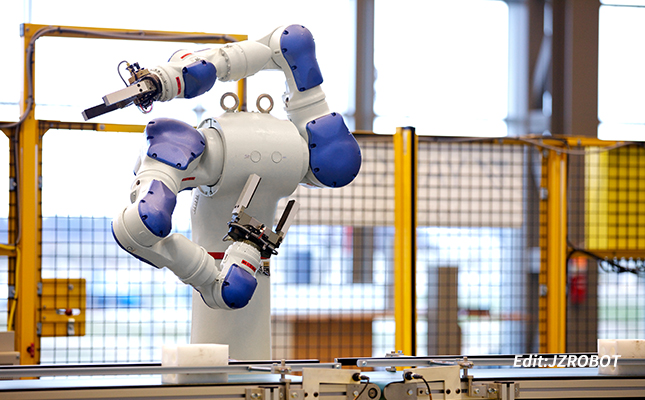
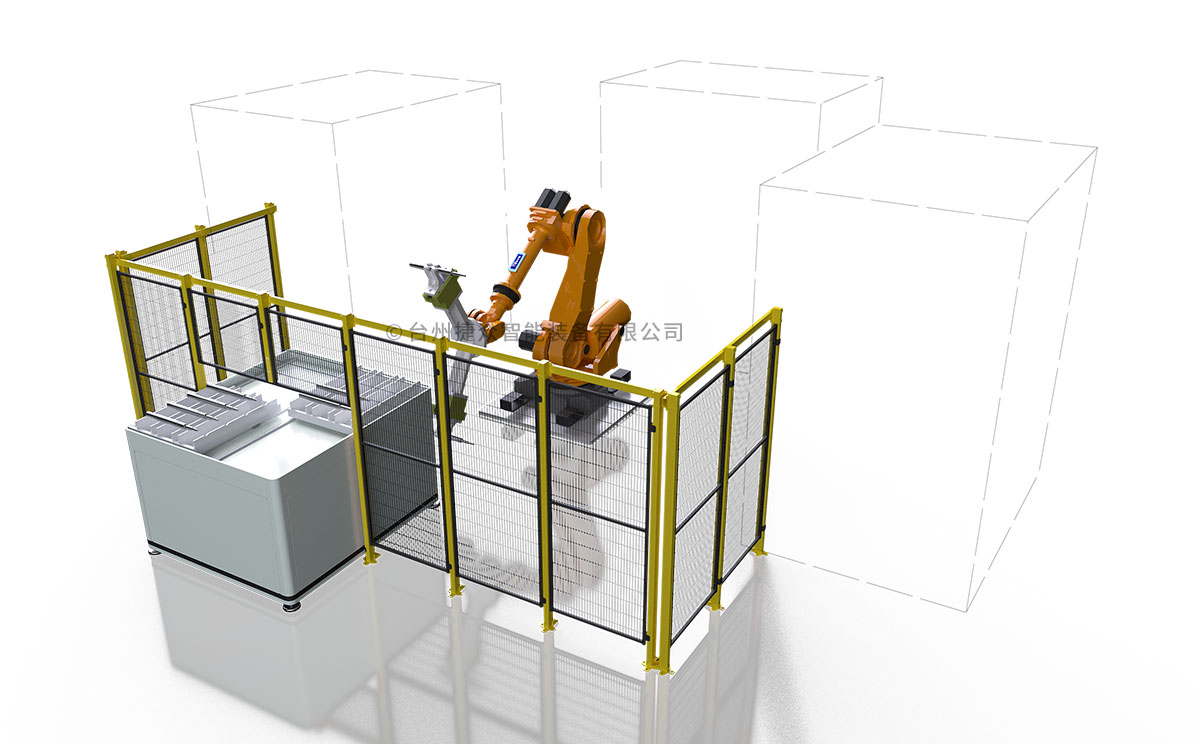
工業(yè)機器人:是有獨立機械機構(gòu)和控制系統(tǒng),能自主的、運動復雜、工作自由度多、操作程序可變,可任意定位的自動化操作機(系統(tǒng)),包含電氣結(jié)構(gòu)和控制單元。是靠自身動力和控制能力來實現(xiàn)各種功能的一種機器,它可以接受人類指揮,也可以按照預先編排的程序動行,現(xiàn)代的工業(yè)機器人還可以根據(jù)人工智能技術制定的原則綱領行動。工業(yè)機器人在工業(yè)生產(chǎn)中能代替某些單調(diào)、頻繁和重復的長時間作業(yè),或是危險、惡劣環(huán)境下的作業(yè)。
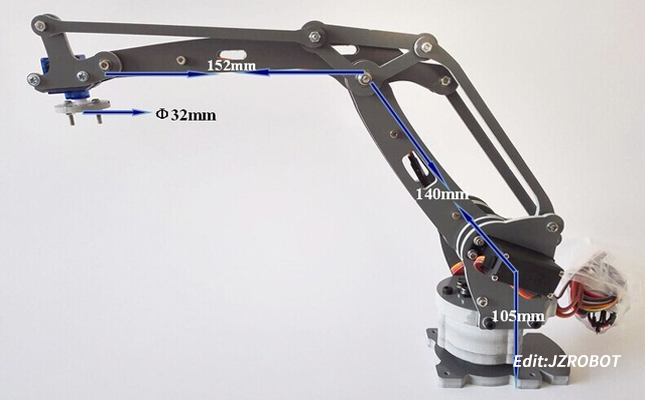
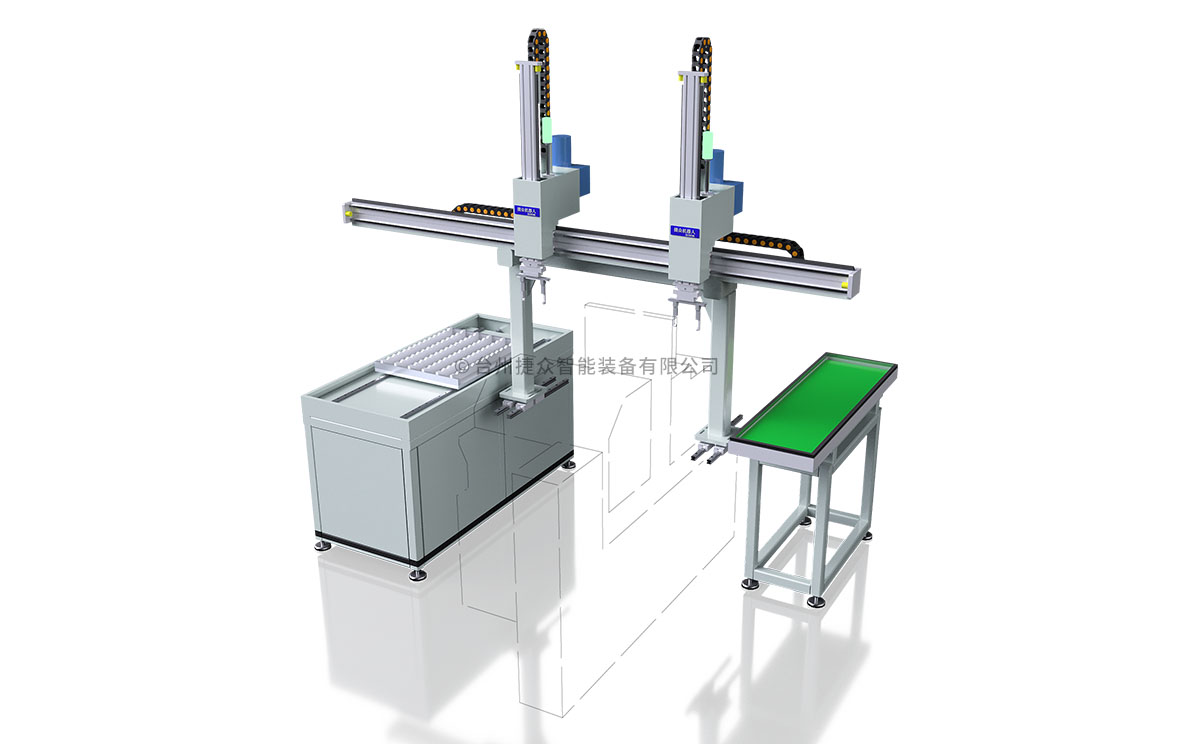
工業(yè)機械手:是模擬人手和臂動作的機電系統(tǒng),根據(jù)機電耦合原理,按主從原則進行工作,因此,它只是人手和臂的延長物,沒有自主能力,附屬于主機設備,動作簡單、操作程序固定的重復操作,定位點不變的操作裝置。也就是說,工業(yè)機械手是用以按固定抓取、搬運物件或是操作工具的自動操作裝置。機械手是早出現(xiàn)的工業(yè)機器人,也是早出現(xiàn)的現(xiàn)代機器人。機械手所用的驅(qū)動機構(gòu)主要有4種:液壓驅(qū)動、氣壓驅(qū)動和機械驅(qū)動。其中液壓驅(qū)動、氣壓驅(qū)動用的多。
通過我們的介紹,相信大家已經(jīng)對工業(yè)機器人機械手的不同多少有點認識。我們擁有一批在機械設備、電氣控制、自動化控制系統(tǒng)等領域多年實踐經(jīng)驗豐富、技術過硬的技術隊伍和銷售隊伍,在行業(yè)內(nèi)享有良好的聲譽。歡迎致電,我們會給您一個最優(yōu)質(zhì)的服務。